El primer que vam fer va ser un esquema de com seria el nostre robot (quins sensors posariem, quina forma tindria, el que voliem que fes...). Quan ho vam tenir clar vam començar a muntar el robot segons l'esquema que haviem fet.
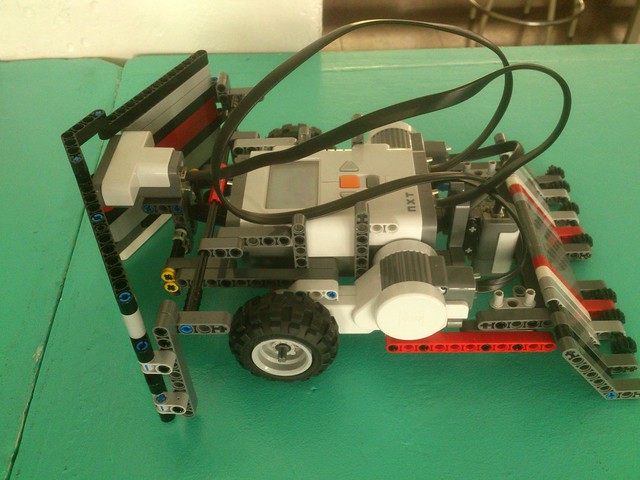
Aquest és l'aspecte del nostre robot, que hem batejat com Monty:
Després del muntatge vam començar amb els programes:
El primer que ens vam proposar va ser intentar que detectes les línies del ring. Ens va cosatr una mica ja que el nostre robot té dos sensors de llum (un al davant i un altre al darrere) i al principi ens feiem un lio amb quin era quin a l'hora de programar.
Quan ens vam aclarir amb els sensors de llum vam passar al sensor d'ultrasons que esta situat a la part del davant.
Aquí deixo tots els programes: el programa principal ...


El subprograma que permet detectar el límit del ring ...

I el subprograma que permet detectar l'enemic i atacar-lo:

Deixo també un petit vídeo de les probes que hem anat fent abans de la competició:
Cap comentari:
Publica un comentari a l'entrada